
Embodied-R1
Collection
Model and Datasets of Embodied-R1 • 11 items • Updated • 5
Embodied-R1: Reinforced Embodied Reasoning for General Robotic Manipulation (ICLR 2026)
[🌐 Project Website] [📄 Paper] [🏆 ICLR2026 Version] [🎯 Dataset] [📦 Code]
Embodied-R1 is a 3B vision-language model (VLM) for general robotic manipulation. It introduces a Pointing mechanism and uses Reinforced Fine-tuning (RFT) to bridge perception and action, with strong zero-shot generalization in embodied tasks.
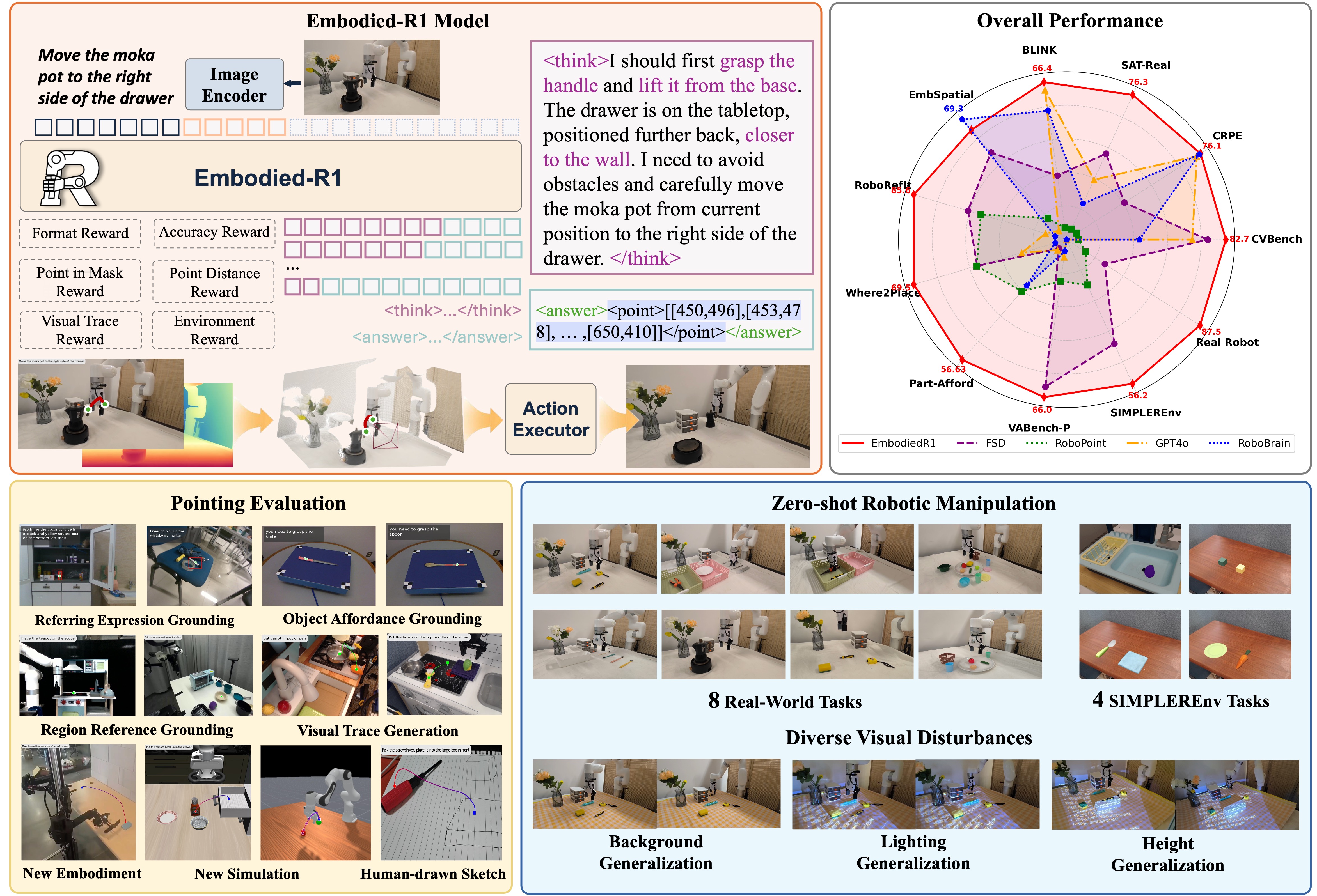 Figure: Embodied-R1 framework, performance overview, and zero-shot manipulation demos.
Figure: Embodied-R1 framework, performance overview, and zero-shot manipulation demos.
This model is intended for research and benchmarking in embodied reasoning and robotic manipulation tasks, including:
git clone https://github.com/pickxiguapi/Embodied-R1.git
cd Embodied-R1
conda create -n embodied_r1 python=3.11 -y
conda activate embodied_r1
pip install transformers==4.51.3 accelerate
pip install qwen-vl-utils[decord]
python inference_example.py
(Visualization examples are available in the project repo: assets/)
cd eval
python hf_inference_where2place.py
python hf_inference_vabench_point.py
...
Related benchmarks:
Training scripts are available at: https://github.com/pickxiguapi/Embodied-R1/tree/main/scripts
# Stage 1 training
bash scripts/stage_1_embodied_r1.sh
# Stage 2 training
bash scripts/stage_2_embodied_r1.sh
Key files:
scripts/config_stage1.yamlscripts/config_stage2.yamlscripts/stage_1_embodied_r1.shscripts/stage_2_embodied_r1.shscripts/model_merger.py (checkpoint merging + HF export)@article{yuan2026embodied,
title={Embodied-r1: Reinforced embodied reasoning for general robotic manipulation},
author={Yuan, Yifu and Cui, Haiqin and Huang, Yaoting and Chen, Yibin and Ni, Fei and Dong, Zibin and Li, Pengyi and Zheng, Yan and Tang, Hongyao and Hao, Jianye},
journal={The Fourteenth International Conference on Learning Representations},
year={2026}
}
@article{yuan2026seeing,
title={From seeing to doing: Bridging reasoning and decision for robotic manipulation},
author={Yuan, Yifu and Cui, Haiqin and Chen, Yibin and Dong, Zibin and Ni, Fei and Kou, Longxin and Liu, Jinyi and Li, Pengyi and Zheng, Yan and Hao, Jianye},
journal={The Fourteenth International Conference on Learning Representations},
year={2026}
}
If this model or resources are useful for your research, please consider citing our work and starring the repository.